


プロジェクト概要
自動運転領域では、認識精度単体の改善だけでなく、説明可能性、安全性評価、敵対的攻撃への耐性まで含めた総合的な研究設計が重要です。SCIENは、将来の実装や検証につながる研究テーマ群を比較し、組み合わせの可能性まで含めて整理しました。
Client
自動運転領域の研究開発に取り組む企業・研究組織様
自動運転技術の研究開発に取り組む企業・研究機関です。認識・予測・安全性を横断した先端研究ポートフォリオの構築を目指しています。 研究テーマのポートフォリオ設計
CrossView、ViewShift、PRISM、TACTICといった候補研究を、認識強化・予測分析・生成技術・セキュリティの観点で比較整理しました。個別テーマの新規性だけでなく、複数テーマをどう連携させると価値が高まるかまでを検討しています。
関与範囲と候補テーマの整理
技術サーベイにとどまらず、実用性と革新性のバランス、評価しやすさ、他テーマとの連携可能性といった観点も含めて候補を整理しました。研究費投下の優先順位づけに使える構成を意識しています。
- 候補研究テーマの洗い出しと比較整理
- 認識・生成・予測・セキュリティの横断整理
- テーマ連携による相乗効果の検討
- 実用性と革新性を踏まえた優先順位づけ
歩行者安全評価のための多視点生成
ViewShiftでは、BEVと前方カメラ映像から3次元骨格構造を推定し、時間的に整合した歩行者動作を複数視点で生成する構想を整理しました。倫理的・実用的制約のあるデータ収集を補完し、安全性評価を高度化する研究テーマとして位置づけています。
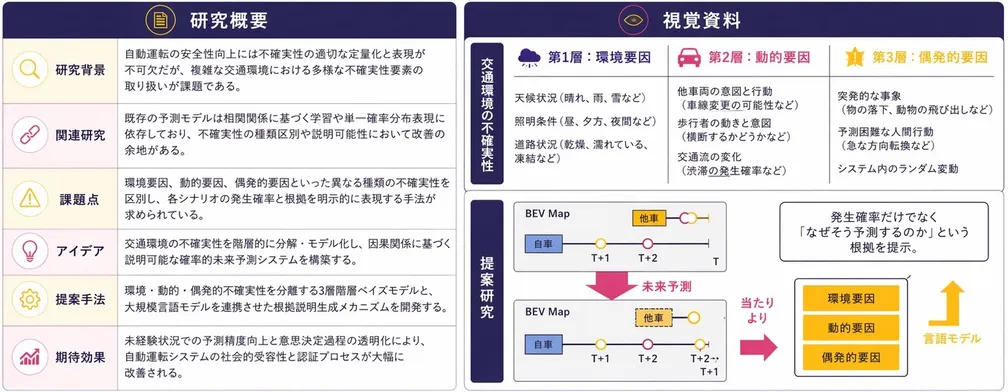
説明可能な未来予測と動的防御
PRISMでは階層的確率モデルによる説明可能な未来予測、TACTICでは連続フレーム間の整合性監視による攻撃検知と防御運転を構想しました。性能だけでなく、根拠提示や安全運行まで含めた研究設計が特徴です。
本プロジェクトにおける価値
最先端トピックを単発で並べるのではなく、将来の自動運転実装に資する研究ポートフォリオとして再構成した点が本プロジェクトの価値です。研究テーマ選定そのものを、事業や安全性評価につながる意思決定へ変換しました。
記事を共有


